Programming Autonomous Underwater Vehicles
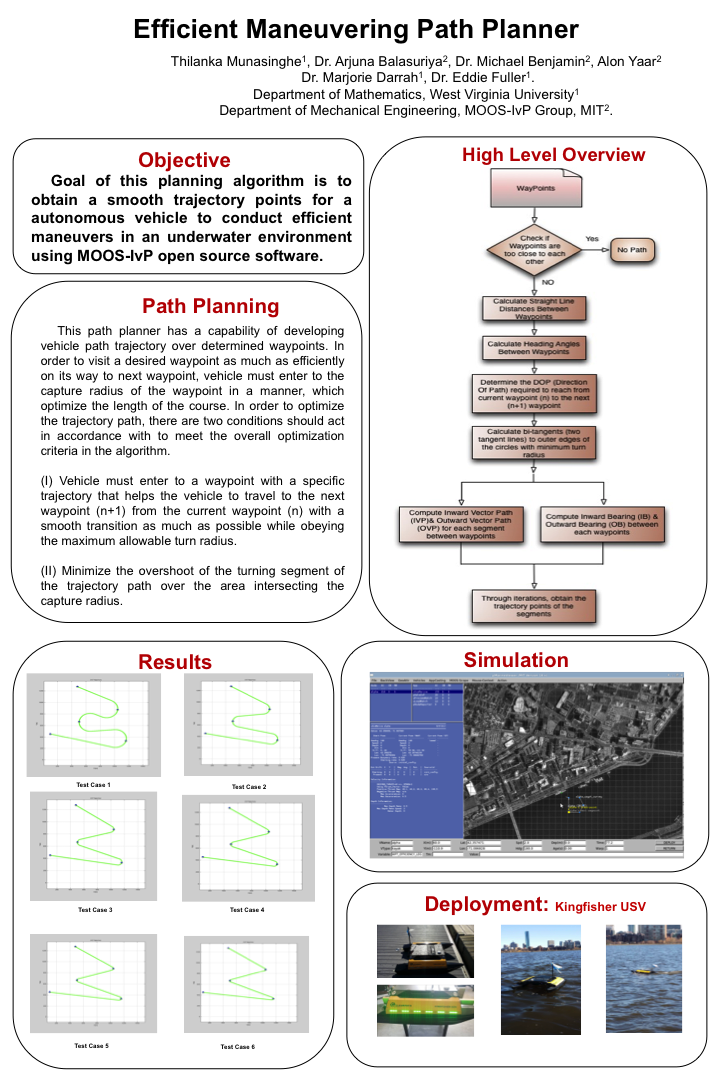
I was at MIT’s Laboratory for Autonomous Marine Sensing Vehicles as a visiting research student in 2014. I collaborated with the research staff on autonomous underwater vehicles by developing designs for several path planning algorithms and extended the open source Mission Oriented Operating Suite-Interval Programming (MOOS-IvP) project by introducing a smooth curve path planner. This path planner was capable of visiting a desired way-point as efficiently as possible on its way to the next way-point. The optimization criteria obeyed the maximum allowable turn radius, while minimizing the turning segment of the trajectory path over the area intersecting the capture radius.
Here is a research poster I presented at the Google I/O 2014 Research Lab.